(0)準備編
(1)キー入力デバイス編
(2)無線デバイス制御編その1 HTTPClient
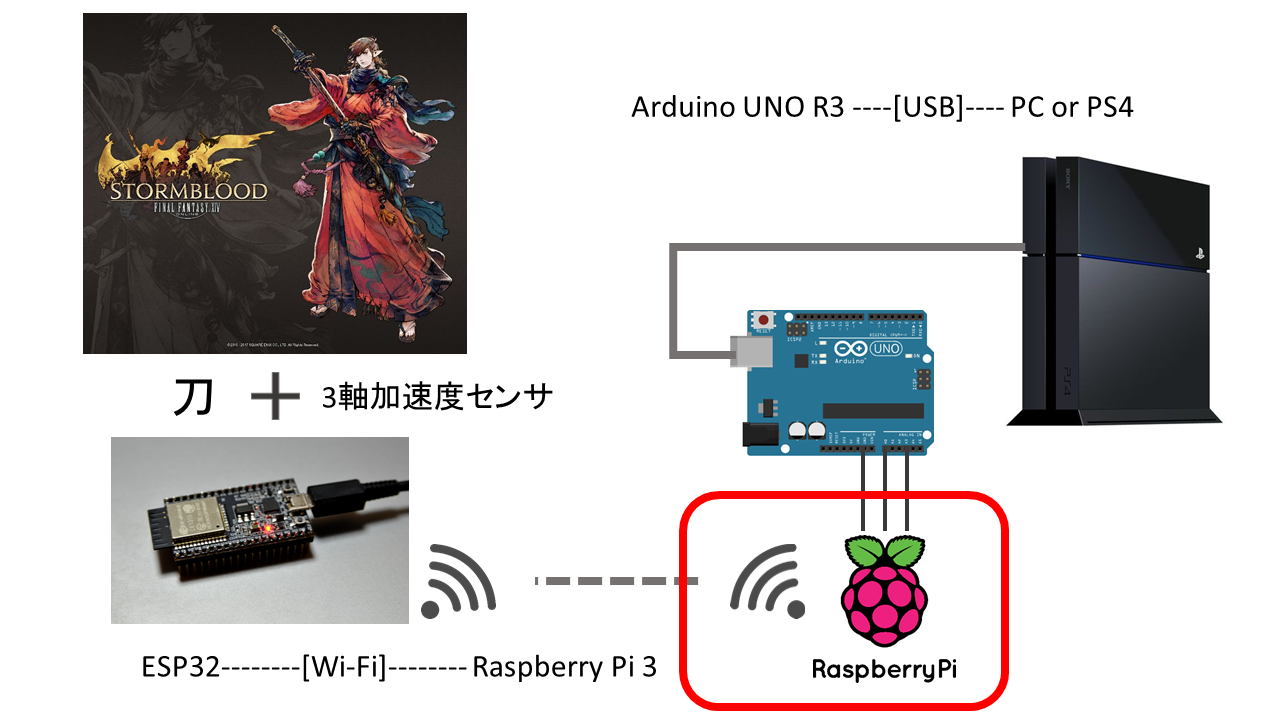
今回はラズパイ(Raspberry Pi 3)で刀からのセンサデータを受信するサーバを作ります。
ラズパイの役割は、刀(加速度センサ+ESP32)が送信するモーションの指令値を受信し、PCへキー入力を行なうArduinoに伝達することです。
ArduinoとラズパイはGPIOピンで接続するため、無線信号の受信処理とGPIO制御が同時に行なえるNode.jsを使ってサーバプログラムを作っていきます。